
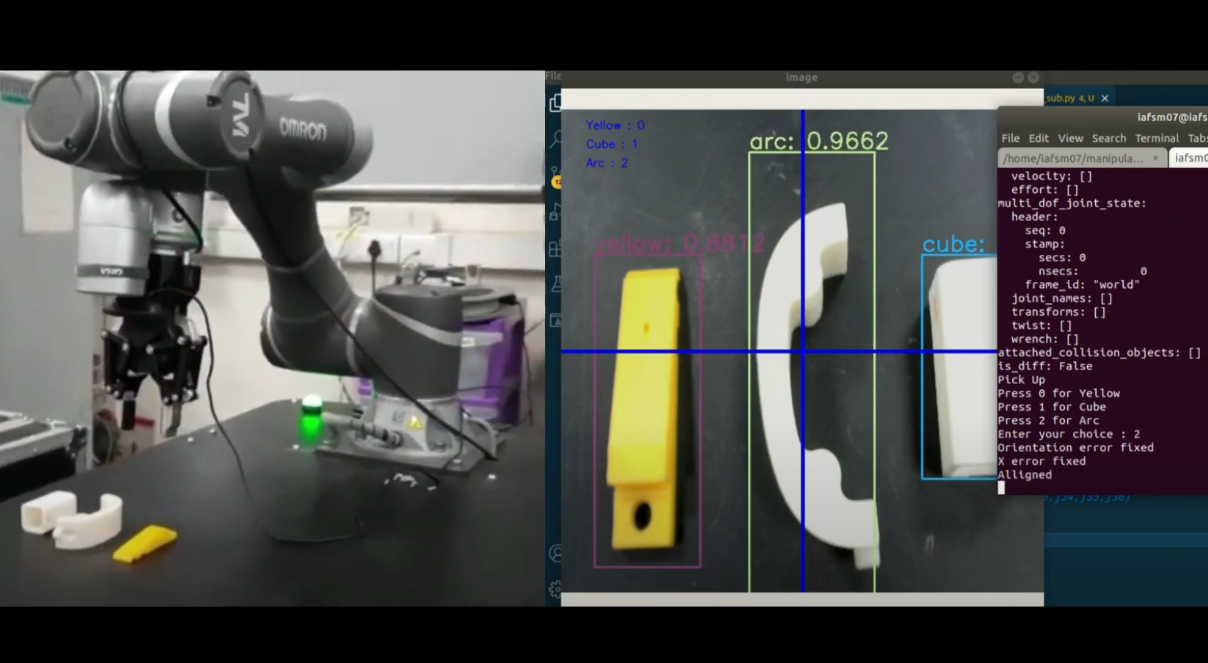
This project involves the integration of Computer Vision with a Cobot(TM5-700) for performing pick-and-place operations on custom 3-D printed objects.
I used a custom YOLOv5-based model for object detection and ROS-Moveit! for controlling the manipulator.