
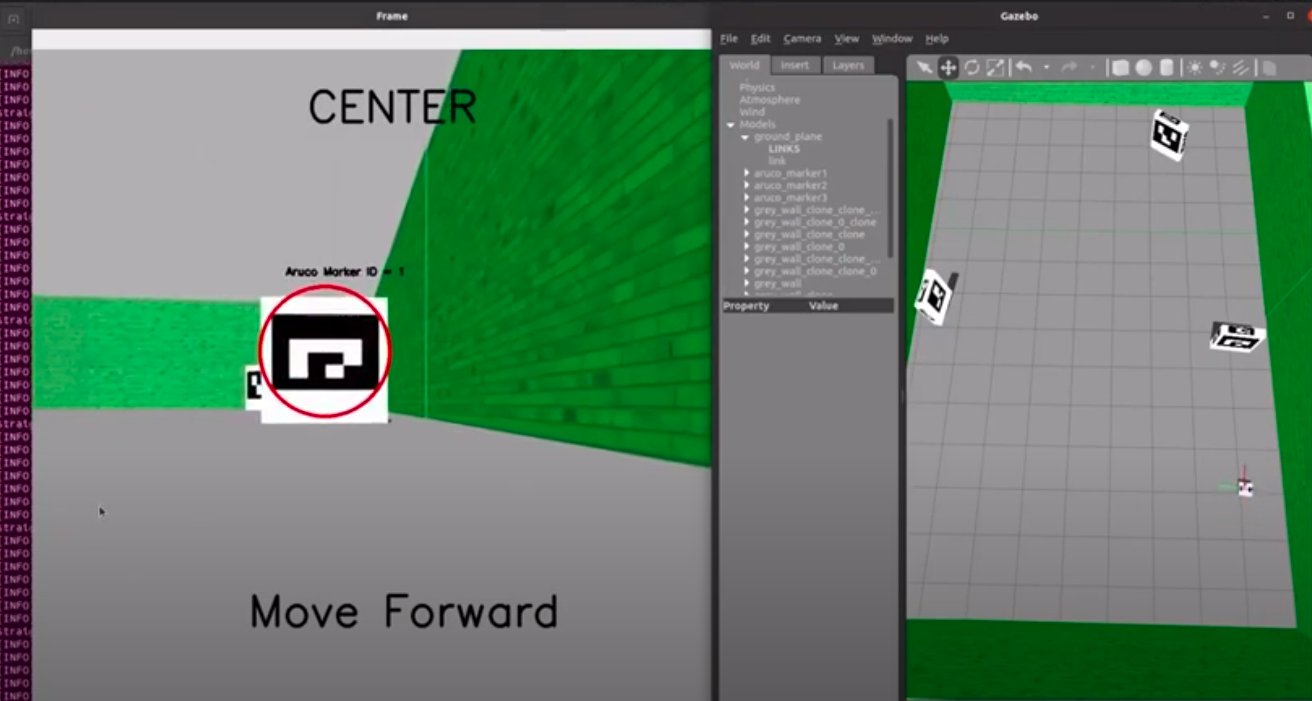
This project aims to make a aruco navigation robot which follow a particular Aruco Marker also keeping a minimum safe distance from it.
The software stacks implemented in this project are ROS and Python. We also made use of OpenCV for the Aruco detection part.
An Aruco marker is a synthetic square marker composed by a wide black border and an inner binary matrix which determines its identifier (id). The black border facilitates its fast detection in the image and the binary codification allows its identification and the application of error detection and correction techniques. The marker size determines the size of the internal matrix.